客户案例
CUSTOMER CASE



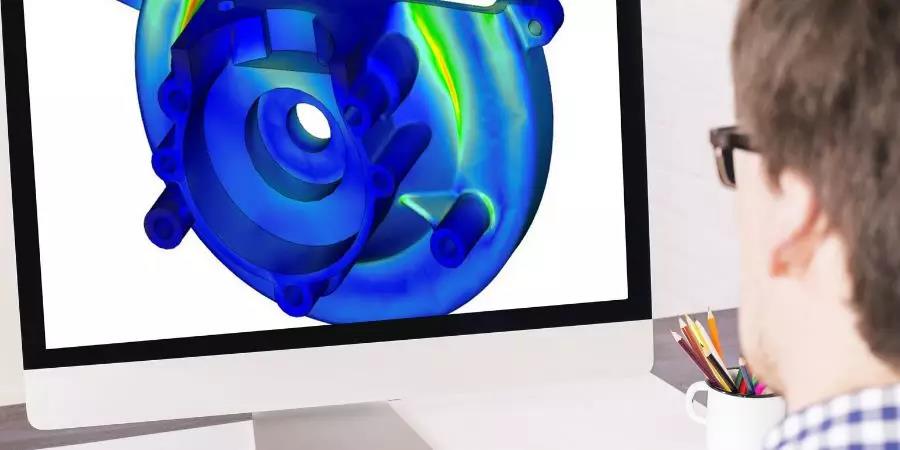
电磁仿真在汽车工业中起着重要作用。WIPL-D 软件不断改进其工具种类,从而支持快速增长行业中的各种应用。随着 CAD 工具的引入(允许轻松导入 CAD 文件,并将结合复杂的 CAD 几何体进行快速的建模和定位),以及 GPU 硬件提供了扩展了直接设计和预测试流程,电磁仿真的范围进一步扩大。此外,WIPL-D 还引入了域分解求解器(DDS),这一产品旨在解决大规模的电磁问题。
本应用说明中展示的示例包括:车顶 GPS 天线、蓝牙与 GSM 干扰,电脑配置为 Inter® Xeon CPU E5-2650 v4 @ 2.2 GHz,2 个处理器,以及嵌入式增强的 PM。这些均运行在一台 GHz 电脑上,2 个处理器,256 GB RAM,以及 4 块 Nvidia GeForce GTX 1080 Ti GPU(矩阵求解在 GPU 卡上进行)。
车顶安装 GPS 天线
此电磁仿真展示了一个基本的应用场景,在该场景中,一个简单的贴片天线被安装在雪铁龙车壳上。
天线被对称地安装在车顶中央,这样可以将未知系数的数量减半,从而减少仿真时间。图 1 展示了车壳以及放大显示的贴片天线位置,线性极化的贴片宽度为 65 毫米,安装在 2 毫米厚的介质板上(Er=2.2)。
独立天线的辐射性在 1.59 GHz 的工作频率下如图 1 所示,而安装后的辐射图则如图 2 所示。
该电磁仿真需要大约 25,000 个未知数(相当于 4.5 GB 的 RAM 或硬盘空间),每个频率的仿真时间大约为 45 秒。
下一步是使用圆形极化贴片和完整的车壳模型来扩展仿真,因为此时贴片天线不再对称,缝隙的尺寸为 6.4 毫米(见图 3)。
完整的车壳模型现在需要大约 45,000 个未知数,几乎是之前仿真中未知数的两倍。仿真每个频率的时间大约为 100 秒。然而,WIPL-D 软件包提供了一项功能,可以减少未知数并快速处理部分矩阵的 —— 这称为天线放置缩减。当将缩减设置为最大值时,电磁仿真仅需大约 17,500 个未知数,仿真每个频率的时间大约为 48.5 秒。图 3 展示了天线位置简化几乎不对结果没有影响,并比较了天线在自由空间和车顶安装时的回波损耗。
蓝牙与 GSM 干扰
下一个例子展示了可以有效仿真车辆内部的各种无线技术设备的干扰。仿真场景包括雪铁龙车壳、车座上的 GSM 移动设备以及控制台合上的蓝牙设备。
移动设备有两个天线,分别用于GSM和蓝牙。图4和图5展示了GSM 天线在自由空间和车内的辐射图(1.8GHz)。
在1.8 GHz(GSM)下的仿真,包括车壳、座椅和控制台,以及两个 通用设备,总共需要大约93,000个未知数。之前提到的配置下的仿真 时间为7.5分钟。在2.4GHz下的电磁仿真需要大约157,000个未知 数,每个频率的仿真时间约为22分钟。
嵌入玻璃窗的FM天线
下一个例子展示了如何将FM接收线天线(108MHz)嵌入车窗中。 车窗玻璃被建模为介质材料(Er=3.5),天线与加热线一起嵌入玻璃窗 中。 该电磁仿真需要约39,000 个未知数,在上述配置下的仿真时间为5 分钟。FM天线的辐射图如图8所示。
车辆间通信
电磁仿真在汽车工业中具有重要作用。WIPL-D软件不断改进其工具 的多样性,使其能够应用于这一不断增长的行业。通过引入CAD工 具(能够轻松导入CAD文件,并结合复杂CAD几何体进行设备建模 和定位)和GPU仿真模块(扩展了应用设计和仿真的频率范围),电 磁仿真的应用范围得到了扩展。此外,WIPL-D引入了域分解求解器 (DDS),这是一款旨在解决电气上非常大的问题的产品。在本应用说 明中,将使用DDS进行车辆间通信的仿真。
WIPL-D 仿真
汽车工业中的一项新兴技术是车辆间通信,以及车辆与环境的相互作 用。主要应用包括收费和安全系统,自动驾驶和停车传感器系统等。这 导致了车载天线数量的增加。在这种情况下,电磁仿真的典型挑战是 设计最佳天线及其定位。一个新兴的频段是5.9GHz。该频段提供了 物理尺寸小的天线,不会影响汽车的外观设计。但在如此高的频率下, 汽车成为了电气上较大的物体。在这一点上,WIPL-D软件套件所提 供的独特功能,使其能够在这些射频频率下进行全波仿真。其独特功 能包括高阶基函数、CAD模型的优化四边形网格划分和GPU增强仿 真。此外,这也是展示DDS功能的一个很好的例子。
DDS 是一种能够对电气上非常大的结构进行全波求解的求解器。它是 为了解决使用WIPL-D的矩量法(MoM)求解器无法解决的问题,或 使用WIPL-D矩量法求解器时需要非常长的仿真时间的问题而开发的。 DDS 的基本思想是将原始模型分解成若干组。每组由多个相邻的平板 和导线组成。每一组代表一个子项目。在第0次迭代中,各子项目独 立仿真,未考虑它们之间的耦合。所有子项目的解被用作宏基函数,其 权重系数由最小化原始项目残差的均方值条件确定。第1次迭代的最 终解残差可以用作第2次迭代的激励,依此类推。当总残差低于预定 阈值时,整个迭代过程结束。
在以下示例中,我们展示了在通用汽车模型上放置3个短天线的情况, 并展示了分析两个汽车同时仿真的高级场景。
在第一次仿真中,我们运行了一个安装了3根天线的单车模型。我们 研究了天线的回波损耗(仅天线1因安装位置导致回波损耗较弱)和 天线之间的耦合。
仿真在一台台式计算机上进行,配备Intel®Xeon®E5-2650v42.20 GHz CPU,双处理器,256 GB RAM 和 4 张 Nvidia GeForce GTX 1080 Ti GPU(矩阵反演在 GPU上执行)。应用对称性,矩量法系统 矩阵中的未知量为90,000个。每个频率的仿真时间约为24分钟。 在5.9 GHz 频率下,第三根天线(安装在车顶)辐射图如图5所示。
最终场景包括2辆车,总共安装了6根天线。由于无法应用对称性, 因此未知数总数增加至364,262。
此时,电磁仿真极具挑战性。在前述的台式计算机上,仿真时间为4.6 小时。通过将汽车底部和对电磁仿真无关紧要的部分放置在阴影区域, 显著减少了未知数。此外,通过降低远离天线的部件上电流近似的阶 数,也减少了未知数。所有这些特性都是自动化的。作为减少未知数的最后一种方法,模型的某些部分(如汽车背部、车门内部等)被手动 选择,并在这些部分上专门设置了减少。这种修改需要用户对电磁仿 真的理解和干预。
使用DDS进行了类似的仿真。复杂场景(包括两辆车)得到了分析, 并展示了相应的辐射图(见图9和图10)。在这种情况下,第一次DDS 迭代足以获得准确的结果。DDS仿真时间如表1所示。